Skills
CONTROL SYSTEMS
MACHINE VISION
MECHTRONICS
Timeline
NOV 23 -AUGUST 24
10 months
Collaborators
TEIGHIN NORDHOLT
SAM WILLIAMSON
AMBROSE STANG
Overview
Built a two-axis camera platform that uses machine vision to keep a rocket centered in frame during launch. The system detects the rocket in live video, predicts motion to offset latency, and commands stepper-driven azimuth and elevation for smooth tracking. I led mechanisms and system layout, controls integration, and tuning.
Objectives
- Keep the rocket centered and in focus through liftoff and ascent
- Azimuth ±180°, elevation 0–90°
- Target rates: 110 deg/s and 45 deg/s²
- 60 fps video to a laptop for real-time processing
Design and Process
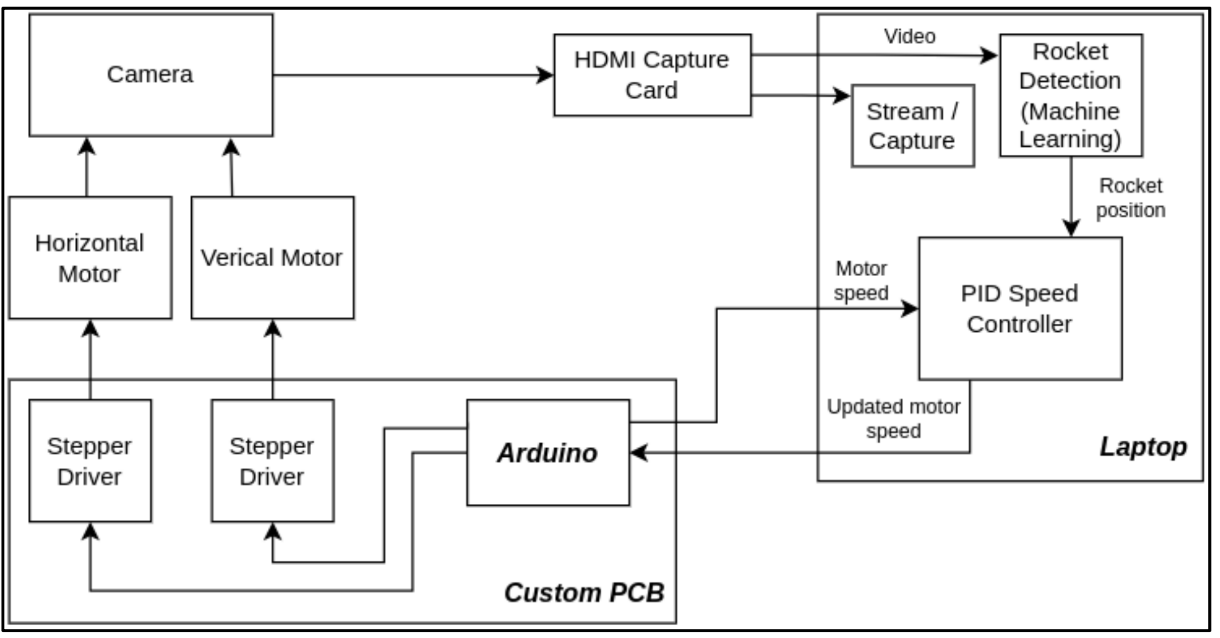
The tracking pipeline uses a YOLOv7 Python detector to output a centroid and confidence each frame, feeding an extended Kalman filter and simple kinematics to predict rocket position and compensate for latency. Azimuth and elevation are stepper-driven with PID control on each axis.
Mechanically, the system uses a stiff twin-plate structure with adjustable feet, a direct-drive mirror for elevation to reduce backlash, and a bearing-supported azimuth ring. A printed camera cradle secures the camera while keeping ports accessible. Electronics are built around a custom PCB, modular stepper drivers, and a 24 V rail from a 4S LiPo.
Testing and Outcomes
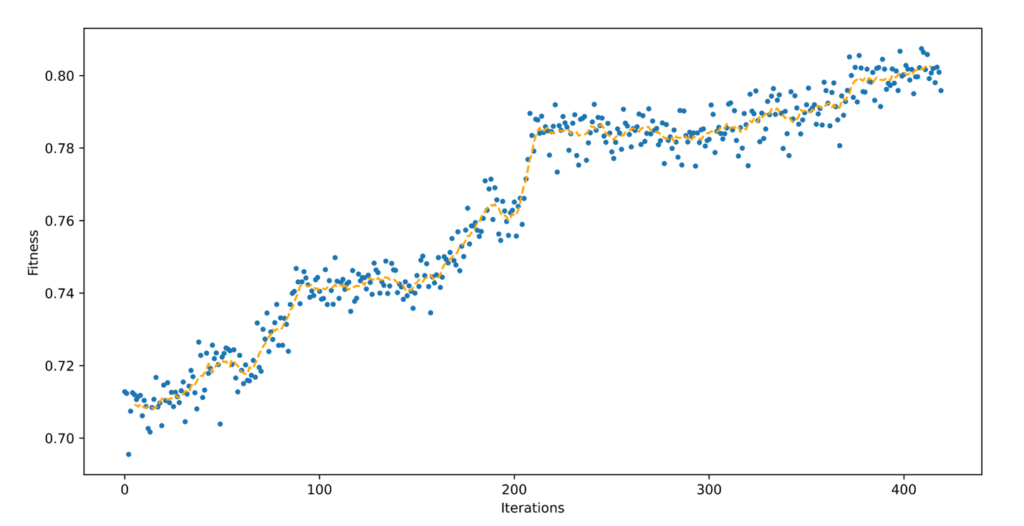
Verification included bench tests of serial links and drivers, axis speed and acceleration checks, and closed-loop tests with live video to tune gains and prediction timing. At competition, the system tracked rockets live with stable center-of-frame performance, contributing to a 3rd place finish in the Technology Development category at Launch Canada and a technical presentation on machine vision for launch operations.
Reflection
This project showed how prediction and low latency are as important as detector accuracy in real-time tracking. I learned how backlash and stiffness drive tracking quality and how modular electronics simplify field debugging. Working under shifting test windows and live launches taught me to make fast, data-driven design decisions.
The final design report is here.