Skills
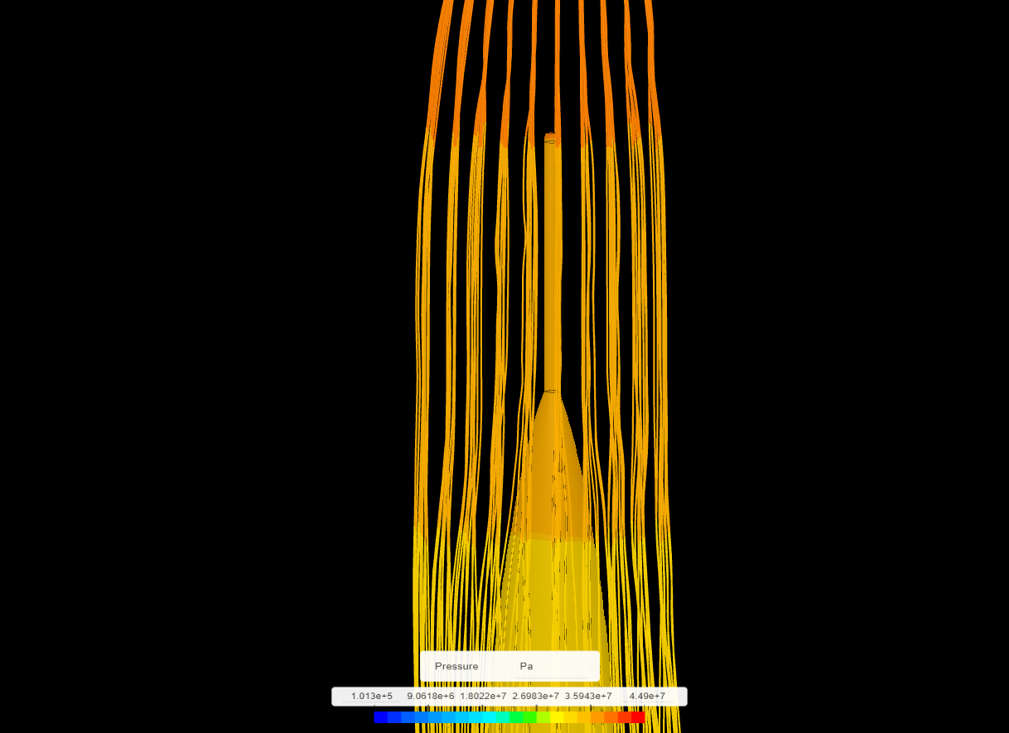
CFD
MECHANICAL DESIGN
INTERGRATION
Timeline
JAN-MAY 24
4 months
Collaborators
Badr Elmanzalawy
Matei Nitu
Andrew Marasinghe
Lucas Mitchell
Harish Raviranjan
Overview
Led a six-person team to design a supersonic pitot probe and integrated nose-cone stack for a client project under a strict $100 budget. I owned scoping and scheduling, systems and mechanical design, electronics and firmware, and integration with the existing rocket structure.
Objectives
- Measure velocity up to Mach 3 and 40,000 ft
- Self-contained power and logging for ≥4 hours
- External arming without opening the airframe
- Fit within existing geometry and rules
- Stay within a $100 total budget
Design and Process
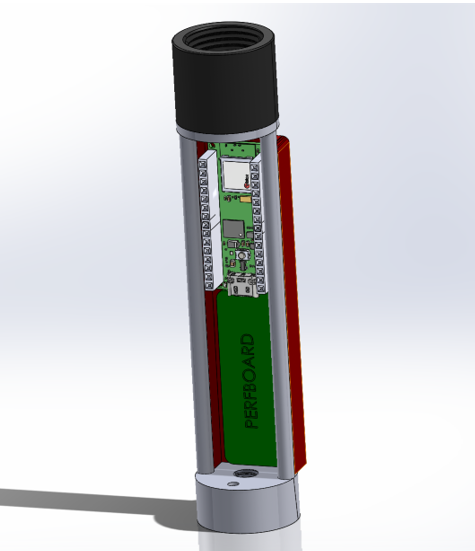
The probe is mounted at the nose tip for clean flow, ~8″ long and 3/8″ OD with a hemispherical tip, and dual internal lines for static and total pressure. The upper body is aluminum, the lower body stainless, with a 1/2″ NPT interface threading into a two-bulkhead nose-cone stack for strength and serviceability.
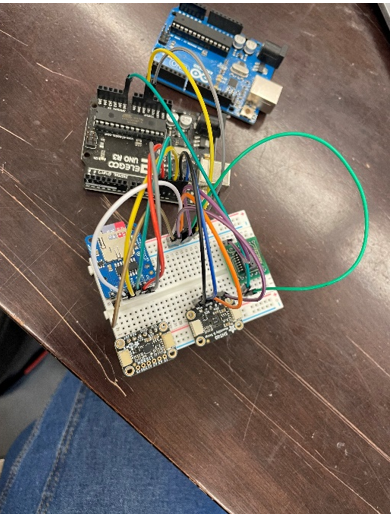
Electronics and Firmware
An Arduino Uno reads pressure, temperature, and humidity sensors for density correction and logs to microSD at 40 Hz in CSV format. A single battery with a screw-switch provides power and external arming without disassembling the nose.
Prototype vs Final Concept
The prototype used a differential path suitable for subsonic testing within budget. The final concept specifies separate static and total sensors ahead of the bow shock to enable accurate supersonic operation in future flights.
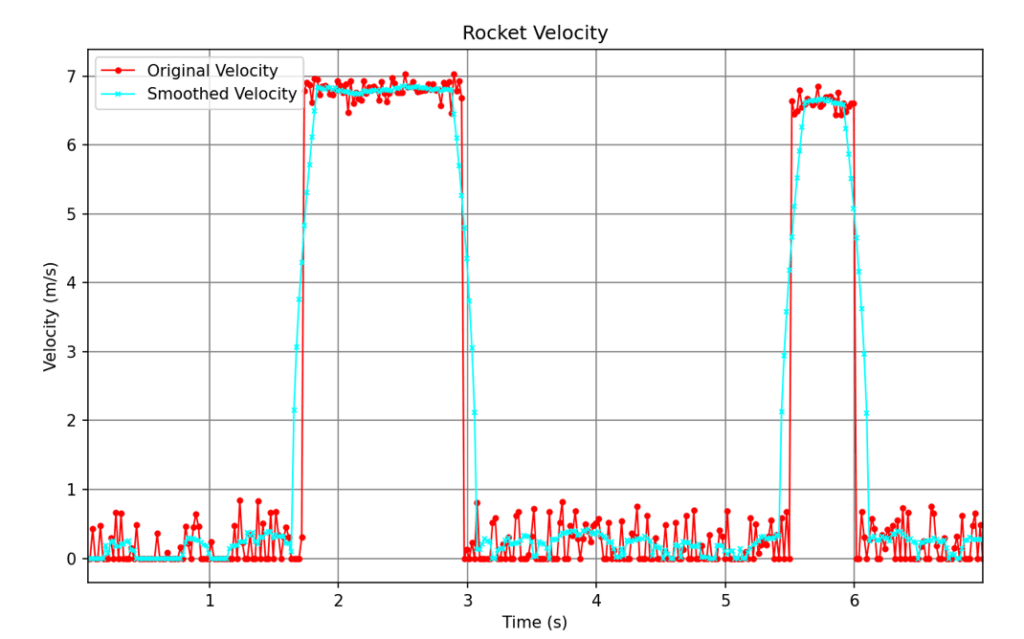
Testing and Outcomes
Schlieren photography informed tip placement in clean flow. Bench tests confirmed logging throughput and ≥4-hour battery life, and subsonic data were reduced using Bernoulli recovery with simple filtering. The team delivered a functional prototype with external arming, a verified data pipeline, and a complete design package and presentation that met the client brief and cost constraints.
Reflection
This project reinforced how probe placement and geometry dominate accuracy in transonic and supersonic regimes, and that environmental compensation can improve repeatability more effectively than higher sensor resolution alone.